本ページで表示するコマンドの利用方法
本ページには、本書の演習を実行するために必要なコマンドを全て記し、さらに、本書への補足情報を記していきます。コマンドを本ページからコピーして実行することにより、書き写すことによるミスの恐れがなく確実に実行できます。
本ページのコマンドをコピーにより活用するためには、まずRaspberry Pi上のブラウザ(Chromium)で本ページを開きます。
そして、コピーしたいコマンドをマウスでなぞり色を反転してください。その状態からそのコマンドをコピーするには下記の二つの方法のうちどちらかを実行してください。
- 色を反転した領域をマウスで右クリックして「コピー」を選択する
- キーボードの「Ctrl」キーを押しながら「C」キーを押す(Ctrl-C)
そして、コピーされたコマンドをターミナルソフトウェアに貼り付けるには、下記の三つの方法のうちどれかを実行してください。
- LXTerminalのメニューから「編集」→「貼り付け」を選択する
- LXTerminal上でキーボードの「Ctrl」キーと「Shift」キーを押しながら「V」キーを押す(Ctrl+Shift+V)
- LXTerminal上でマウスのホイールを押し込む(ただし、この方法は正確には「コピーされた文字を貼り付ける」のではなく「マウスで色が反転された文字を貼り付ける」という動作になります)
いずれかの方法でLXTerminalにコマンドが貼り付けられたら、そのままキーボードの「Enter」キーを押せばコマンドが実行されます。
なお、複数のコマンドが複数行にわたって連続して書かれている場合、コピー、貼り付け、実行はコマンド一つごとに行ってください。
それでは、本ページを活用して、Raspberry Pi での電子工作を楽しんでください!
2章
p.16, Raspberry Pi を購入できるショップへのリンク
入手しやすい Raspberry Pi の購入リンクを、著者による別書籍「Raspberry Piではじめる機械学習 補足情報」のサポートサイト
「Raspberry PiへのOSのインストール方法」の冒頭にまとめましたのでご利用ください。
p.19, Pi 5 対応のACアダプタへのリンク
p.19 に記した、Pi 5 に対応したACアダプタへのリンクを以下に記します。2025年8月現在、公式版、スイッチサイエンス版、KSY版があります。お好みのものをお求めください。
p.25, Raspberry Pi Imager のダウンロードページへのリンク
p.25 に記した、Raspberry Pi Imager のダウンロードページへのリンクは以下の通りです。
p.25, Raspberry Pi Imager バージョン 2.0.0 以降
2025年11月末、Raspberry Pi Imager バージョン 2.0.0 がリリースされました。機能はそれまでのバージョンとほぼ同じなのですが、見た目や操作方法が若干違うので戸惑う方もいるかもしれません。
ここでその操作方法をまとめておきます。
起動した Raspberry Pi Imager を示したのが下図です。
まず、「Device」を選択しなければなりません。それにより、「OS」に現れる OS の候補を(フィルタリングして)減らす効果があります。
例えば、用いているのが Raspberry Pi 5 である場合、下図のように「Raspberry Pi 5」をクリックして選択します。そうすることで、右下の「次へ」ボタンをクリックできるようになります。
なお、デバイスを選択したくない場合、一番下にある「No filtering」という選択肢をクリックすることもできます。「次へ」をクリックしましょう。
次に、「OS」項目でインストールしたい OS を選択することになります。例えば、下図のように「Raspberry Pi OS (64-bit)」や「Raspberry Pi OS (32-bit)」などを選択し、「次へ」ボタンをクリックしましょう。
次に、「ストレージ」を選択することになります。microSDカードがPCに接続済であれば、下図(A)のようにmicroSDカードが選択肢として現れますので、クリックして選択し、「次へ」ボタンをクリックしましょう。
なお、現れた microSD カードが、下図(B)のようにエクスプローラーの「PC」の項目に現れるものと一致していることを念のため確認しておきましょう。比較するポイントは「ドライブ文字」(下図では「D:」)と「容量」(下図では 32GB 付近の値)です。ドライブ文字はPCの環境によって異なりますので注意してください。microSDカードの容量は、カードに「32GB」と書かれていても、表示は下図のように数GBずれることがありますが気にする必要はありません。
また、PCに外付けハードディスクなどが接続されていると、下図(A)の選択肢が複数現れます。このとき、
正しくmicroSDカードの方を選択しないと、皆さんの大切なデータが壊れてしまいますので注意して選択しましょう。
次に、下図のように OS の設定を行う画面が出てくるのですが、ここでは
「SKIP CUSTOMISATION」ボタンをクリックして設定をスキップします。ここで設定を行うと、Raspberry Pi 起動後の設定が現れず、デスクトップなどの設定が英語のままになるという問題が起こってしまうのです。その問題が起こってしまった場合の対処方法は「
Raspberry Pi をヘッドレスでセットアップする」に記されていますので、必要に応じてごらん下さい。
すると、以下のような最終確認画面が現れますので、「WRITE」ボタンをクリックします。
すると、下図のように、microSDカードの中身が消えてしまうぞ、という確認が現れますので、覚悟を決めて「I UNDERSTAND, ERASE AND WRITE」ボタンをクリックします。
すると、下図のようにOSのインストールが始まります。数GBのOSをインターネットからダウンロードして書き込みますので、30分以上かかることがあります。ゆっくりお待ちください。
Writing (書き込み) が100%になるとVerifying (確認) が始まり、それも100%になるとmicroSDカードへのOSのインストールが完了し、下図のような画面で書き込みが終了したことが知らされます。
この画面になったらPCからmicroSDカードを取り外して構いません。そして、Raspberry Pi Imager を終了しましょう。取り外したmicroSDカードを、次にRaspberry Piに接続することになります。
p.28, Pi Zero 系の機種にインストールすべき OS
書籍において、『Pi Zero 2 W では「Raspberry Pi OS (Legacy, 32-bit)」を選択したほうが安定して動作する可能性』があると記しました。執筆当時の Legacy OS は Bullseye でした。
これは、執筆当時の最新 OS である Bookworm では、2023-10-10 から 2024-03-15 のバージョンまで、OS の更新時に処理が進まなくなる、などの問題があったためです。
この問題は、2024-07-04 のバージョンで改善されましたので、Pi Zero 系の機種で Bookworm を選んでいただいても問題ありません。
さらに、2025年10月に OS が更新され、最新版 = Trixie、Legacy = Bookworm へと変更されました。どの OS を用いても利用可能となるよう、メンテナンスを続けています。
いずれにせよ、ブラウザの動作が非常に重いなど、Pi Zero 系が上級者向けの機種であることには変わりがありません。
また、Pi Zero 系の機種を用いる場合は、下記の解説ページも合わせてごらんください。
p.37, Raspberry Pi Connect の設定項目
設定ウィザードにて、Raspberry Pi Connect の設定を行う画面が現れると述べました。この設定は、2024-10-22 以降の Raspberry Pi OS では現れません。本書の演習には影響がありませんので、そのまま設定を続けてください。
p.37, Raspberry Pi のアップデートをスキップする件について
書籍の p.37 にて、設定ウィザードにおける Raspberry Pi のアップデートをスキップするよう推奨しました。
ここでアップデートを行うと、綺麗な日本語フォント (fonts-vlgothic)や日本語入力ソフト(fcitx-mozc)がインストールされるようなのですが、fcitx-mozc はデフォルト環境(Wayland)では正常に動作しませんし、キーボードが英語キーボードとして認識されてしまう問題もありますので、やはりここはスキップが無難と個人的には思います。なお、それらの問題の対処法は本ページ下部にある「p.244, 日本語入力ソフトウェアのインストールコマンド」の項目付近に記されています。
p.39, Trixie での設定アプリケーションについて
設定ウィザード終了後の設定について、本書では設定アプリケーションを紹介しました。2025年10月にリリースされた最新 OS Trixie では、この設定アプリケーションの起動法や見た目が変更されておりますので、ここで解説します。
まず、起動は下図のように「設定」→「Control Centre (コントロールセンター)」を選択することで行います。
起動したアプリケーションの左側の項目で「システム」を選択すると、本書図2-26に相当する画面が現れます。左側の項目をスクロールしないと「システム」が見つからないことがありますのでご注意ください。
同様に、左側の項目で「ディスプレイ」や「ローカライゼーション」を選択すると、本書で解説した設定を行うことができます。
3章
p.44, 秋月電子通商のパーツセットへのリンク
p.44 に記した、秋月電子通商のパーツセットは下記ページで販売されております。
2025年春頃より、このパーツセットの在庫が切れた状況が長らく続いていましたが、
2025年7月3日に在庫が復活していることを確認しました。ぜひ本書と合わせてお楽しみください!
さらに、このパーツセットをマイコンボードである Raspberry Pi Pico シリーズで利用する方法も公開しています。本書を終えた後の応用編としてお楽しみください!
なお、パーツセットが一時的に品切れの場合、あるいはパーツセット内のパーツを単品で欲しい場合、下記のリストをご活用ください。
おおむねパーツセットと同等のパーツを入手できますが、「抵抗100本、赤色LED10個、コンデンサ10個」のように、多めに購入せざるを得ないパーツがある点はご了承ください。
|
パーツ
|
個数
|
|
ブレッドボード BB-801:105294
|
1
|
|
ブレッドボード・ジャンパーワイヤ(オス-メス) 15cm(赤):108933
|
2パックで20本
|
|
ブレッドボード・ジャンパーワイヤ(オス-オス) :105159
|
1パックで60本以上
|
|
カーボン抵抗(炭素皮膜抵抗) 1/4W330Ω125331
|
1パックで100本入り
|
|
カーボン抵抗(炭素皮膜抵抗) 1/4W10kΩ125103
|
1パックで100本入り
|
|
3mm赤色LED 660nm 250mcd LT3U31P:102320
|
1パックで10個入り
|
|
RGBフルカラーLED 5mm OSTA5131A カソードコモン:102476
|
1
|
|
LED光拡散キャップ 5mm 白:100641
|
1
|
|
タクトスイッチ(黒色):103647
|
3
|
|
半固定ボリューム 10kΩ[103]:108012
|
3
|
|
CdSセル 5mmタイプ:100110
|
1
|
|
積層セラミックコンデンサー 0.01μ50V X7R 2.54mm:104063
|
1パックで10個入り
|
|
12bit 8ch ADコンバーター MCP3208-CI/P:100238
|
1
|
|
DCモーター FA-130RA-2270L:109169
|
1
|
|
マイクロサーボ9g SG-90:108761
|
1
|
|
DRV8835使用ステッピング&DCモータードライバーモジュール:109848
|
1
|
電池ボックス 単3×3本 リード線・スイッチ付:112240
|
1
|
|
ADT7410使用 高精度・高分解能 I2C・16Bit 温度センサーモジュール:106675
|
1
|
|
Raspberry Pi キャラクター液晶ディスプレイモジュール完成品:111753
|
1
|
回路の配線図について
サンプルファイルの中に、本書で作成する回路の配線図が gihyo-RaspberryPi-Circuit.pdf というPDFファイルとして含まれていますのでご活用ください。
このファイルを Windows や macOS で閲覧したい場合、以下のリンクからダウンロードすることもできます。
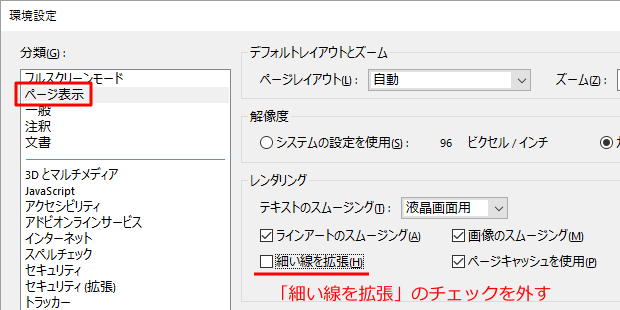
このファイルを Windows や macOS などの Adobe Reader で閲覧する際、「編集」→「環境設定」を選択し、下図のように「細い線を拡張」のチェックを外すと、より綺麗な配線図を見ることができます。
チェックを外す前後の配線図の状態を示したのが下図です。「細い線を拡張」のチェックを外した方が図がきれいに表示されているのがわかるでしょう。
なお、この設定はPDFの印刷の際には影響しないはずです。
5章
p.102, OpenCV のインストールコマンド
p.102に記した、OpenCV のインストールコマンドを以下に記します。
まず、次のコマンドでインストール可能なパッケージのリストを更新するのでした。
sudo apt update
それが終わったら、次のコマンドで OpenCV をインストールできます。
sudo apt -y install python3-opencv
p.104, mplayer のインスト―ルコマンド
p.104に記した、 mplayerのインストールコマンドを以下に記します。
次の二つのコマンドを、一つずつ順番に実行してください。
sudo apt update
sudo apt -y install mplayer
p.105, mplayer の実行コマンド
ターミナルを起動した後、プログラムの存在する gihyo フォルダ(ディレクトリ)に下記のコマンドで移動します。
cd gihyo
そのターミナルで以下のコマンドを実行すると、05-07-test.mp3 というサンプル音声を再生することができます。デフォルトでは HDMI 接続したディスプレイから音声が鳴るでしょう。
mplayer 05-07-test.mp3
これらのコマンドは、p.122の6.5章でも用いられます。
p.105, 音声の出力先を変更する方法
Pi 4 B までの機種で、音声を HDMI ケーブル経由ではなく、Raspberry Pi の基板上のイヤフォンジャックから聞きたい場合、デフォルトでは音が鳴らないことがあります。
イヤフォンジャックから鳴らすための方法は、OSのバージョンにより異なります。
<Bookworm 以降の場合>
もし、デフォルトでピンジャックから音が出ていない場合、以下の指示に従ってください。なお、raspi-config コマンドを実行中は、キーボードの Esc キーが「戻る」に対応しますので、困ったら Esc キーを何度か押してみると良いでしょう。
- ターミナルで「 sudo raspi-config 」コマンドを実行し、設定画面を開く
- キーボードの「↓」キーを五回押し、「6 Advanced Options」にフォーカスを合わせる
- キーボードの「Enter」キーを押し、「6 Advanced Options」に入る
- キーボードの「↓」キーを複数回押し、「A7 Audio Config」にフォーカスを合わせる(冒頭が A8 のこともある)
- キーボードの「Enter」キーを押し、「A7 Audio Config」に入る
- キーボードの「上」キーを一回押し、「1 PulseAudio」にフォーカスを合わせる
- キーボードの「Enter」キーを押し、「1 PulseAudio」を選択する
- キーボードの「Enter」キーを押し、「了解」を選択する
- キーボードの「TAB」キー二回を押し、「Finish」にフォーカスを合わせる
- キーボードの「Enter」キーを押すと、再起動され設定が有効になる
<Bullseye の場合>
2020-12-02版およびそれ以降の Raspberry Pi OS をご利用で、なおかつイヤフォンジャックから音が鳴らない場合、raspi-configというコマンドで音声の出力先をイヤフォンジャックに切り替えます。
以下の手順に従ってください。
- ターミナルで「 sudo raspi-config 」コマンドを実行し、設定画面を開く
- キーボードの「Enter」キーを押し、「1 System Options」に入る
- キーボードの「↓」キーを一回押し、「S2 Audio」にフォーカスを合わせる
- キーボードの「Enter」キーを押し、「S2 Audio」の設定画面に入る
- キーボードの「↓」キーを一回押し、「1 Headphones」にフォーカスを合わせる
- キーボードの「Enter」キーを押し、「1 Headphones」を選択する
- キーボードの「TAB」キー二回を押し、「Finish」にフォーカスを合わせる
- キーボードの「Enter」キーを押し、raspi-config の設定画面を終了する
以上で、イヤフォンジャックから音声が出るようになります。
6章
p.116, 図6-7、Raspberry Pi Connect の設定項目
p.116 の図6-7では、Raspberry Pi Connect の設定項目が上から2番目に表示されています。この設定項目は、2024-10-22 以降の Raspberry Pi OS では現れません。本書の演習には影響がありませんので、気にせず演習を続けてください。
p.116, 図6-7、Trixie における設定アプリケーションについて
SPI を有効にするため、本書では設定アプリケーションを起動しました。2025年10月にリリースされた最新 OS Trixie では、この設定アプリケーションの起動法や見た目が変更されておりますので、ここで解説します。
まず、起動は下図のように「設定」→「Control Centre (コントロールセンター)」を選択することで行います。
起動したアプリケーションの左側の項目で「インターフェイス」を選択すると、本書図6-7に相当する画面が現れます。左側の項目をスクロールしないと「インターフェイス」が見つからないことがありますのでご注意ください。下図では、6 章で用いる SPI と 7 章で用いる I2C の項目が有効にされています。
7章
p.126, 図7-3、Raspberry Pi Connect の設定項目
p.126 の図7-3では、Raspberry Pi Connect の設定項目が上から2番目に表示されています。この設定項目は、2024-10-22 以降の Raspberry Pi OS では現れません。本書の演習には影響がありませんので、気にせず演習を続けてください。
p.126, 図7-3、Trixie における設定アプリケーションについて
I2C を有効にするため、本書では設定アプリケーションを起動しました。2025年10月にリリースされた最新 OS Trixie では、この設定アプリケーションの起動法や見た目が変更されておりますので、ここで解説します。
まず、起動は下図のように「設定」→「Control Centre (コントロールセンター)」を選択することで行います。
起動したアプリケーションの左側の項目で「インターフェイス」を選択すると、本書図6-7に相当する画面が現れます。左側の項目をスクロールしないと「インターフェイス」が見つからないことがありますのでご注意ください。下図では、6 章で用いる SPI と 7 章で用いる I2C の項目が有効にされています。
p.129, 接続されている I2C デバイスのアドレスを表示するコマンド
接続されている I2C デバイスのアドレスを表示するコマンドは以下の通りです。
i2cdetect -y 1
p.137, LCD へ文字を表示するプログラムの実行コマンド
ターミナルを起動したあと、プログラムの存在する gihyo フォルダ(ディレクトリ)に下記のコマンドで移動します。
cd gihyo
そのターミナルから 07-02-LCD.py を実行するコマンドは以下の通りです。付録C.3「タブによる補完」を学ぶと、ターミナルでのプログラムの実行が格段に楽になりますので興味のある方は参考にしてください。
python3 07-02-LCD.py
このコマンドに、「'test'」という引数をつけて実行する場合のコマンドは下記の通りです。p.137に記した通り、「↑」キーにより過去に実行したコマンドを再表示すると楽にこのコマンドを記述できます。
python3 07-02-LCD.py 'test'
p.142, /etc/rc.local を管理者権限の mousepad で開くためのコマンド
p.142に記した, /etc/rc.local を管理者権限の mousepad で開くためのコマンドは以下の通りです。
sudo mousepad /etc/rc.local
さて、このコマンドを実行したとき、既存ファイルである /etc/rc.local がテキストエディタ mousepad で開かれます。そうなった方は先に進んで構いません。
しかし、2024年11月以降の OS では、ファイル /etc/rc.local が削除され存在しないため、mousepad は空白の状態で開きます。そうなった場合、一旦 mousepad を閉じ、以下の3コマンドを順に実行することにより、新たにファイル /etc/rc.local を作成しましょう。
wget https://raw.githubusercontent.com/neuralassembly/raspi/refs/heads/master/rc.local
chmod a+x rc.local
sudo mv rc.local /etc
この3コマンドを実行してファイル /etc/rc.local を作成したら、上記の mousepad で /etc/rc.local を開くコマンドを実行し、以下に進みましょう。
p.142, LCD へ文字を表示するプログラムの実行コマンドを、/etc/rc.local に記述するための表記
p.142 に記した、/etc/rc.local の「exit 0」の行の上に記すべきコマンドは以下の通りです。ただし、「kanamaru」の部分は皆さんのユーザー名で置き換える必要があります。末尾の「&」も忘れずに記述しましょう。
python3 /home/kanamaru/gihyo/07-03-LCD-temp.py &
さらに、/etc/rc.local の「exit 0」の行の上に記すべき、シャットダウンボタン用のコマンドは下記の通りです。やはり、「kanamaru」の部分は皆さんのユーザー名で置き換える必要があります。末尾の「&」も忘れずに記述しましょう。
python3 /home/kanamaru/gihyo/05-06-sw-poweroff.py &
8章
p.169, ハードウェアPWMを利用するための準備
本書p.169 に記した、管理者権限の mousepad で /boot/firmware/config.txt を編集用に開くコマンドは下記の通りです。
sudo mousepad /boot/firmware/config.txt
なお、執筆時の Legacy OS である Bullseye ではファイルが /boot/config.txt であるため、コマンドは下記に変更されます。
sudo mousepad /boot/config.txt
そして、そのファイルの末尾に記すべき一行は下記の通りです。
dtoverlay=pwm-2chan
記した後ファイルを上書き保存し、Raspberry Pi を再起動するのでした。
ハードウェアPWMのトラブル
2025年5月にリリースされたOSでは、Linuxのコアである kernel のバージョンが 6.12 となり、Pi 5 でハードウェアPWMを出力するための仕様が変わりました。
そのため、その対応を施したサンプルファイルでしか動作しなくなっております。2025年6月22日にサンプルファイルを更新しましたので、それ以降にダウンロードした方でしたら問題なく動作します。
古いサンプルファイルをご利用の方は、ホームフォルダの gihyo フォルダを一度削除し、最新のファイルをダウンロードし直してください。
変更を受けたのは下記の4ファイルです。
- 08-04-servo.py
- 08-06-2servos.py
- 09-05-servo/app.py
- 10-03-servo/app.py
なお、やや細かな話ですが、GPIO 18 と 19 にハードウェア PWM 信号を出力するために用いるインターフェースは下記のようになります。
| kernel 6.6 までの Pi 5 | /sys/class/pwm/pwmchip2/pwm{2,3} |
| kernel 6.12 以降の Pi 5 | /sys/class/pwm/pwmchip0/pwm{2,3} |
| Pi Zero ~ Pi 4 | /sys/class/pwm/pwmchip0/pwm{0,1} |
9章
p.180, FastAPI のインストールコマンド
p.180に記した、FastAPI のインストールコマンドは以下の通りです。二つのコマンドを一つずつ実行しましょう。
sudo apt update
sudo apt -y install python3-fastapi
p.181, IP アドレスを調べるためのコマンド
p.181に記した、IP アドレスを調べるためのコマンドは以下の通りです。
ifconfig
p.184, FastAPI用に書かれたプログラムを実行するためのコマンド
p.184に記した、FastAPI用に書かれたプログラムを実行するためのコマンドは以下の通りです。
新規に開いたターミナルで、下記のコマンドを一つずつ順に実行するのでした。
cd gihyo/09-01-led
python3 app.py
同様に、9章のすべての実行コマンドを一気に列挙します。
どれも、新規に開いたターミナルで実行する必要があります。
cd gihyo/09-02-temp
python3 app.py
cd gihyo/09-03-rgbled
python3 app.py
cd gihyo/09-04-dcmotor
python3 app.py
cd gihyo/09-05-servo
python3 app.py
なお、「ターミナルに新規に開いて実行」ではなく、例えば「今 09-01-led フォルダにいるが、次に 09-02-temp フォルダの app.py を実行したい」などという場合、実行すべきコマンドは以下のようになるでしょう。
これは「..」が「一つ上のフォルダ」を意味することを知ればその意味を理解できるでしょう。
cd ../09-02-temp
python3 app.py
ハードウェアPWMのトラブル
2025年5月にリリースされたOSでは、Linuxのコアである kernel のバージョンが 6.12 となり、Pi 5 でハードウェアPWMを出力するための仕様が変わりました。
そのため、その対応を施したサンプルファイルでしか動作しなくなっております。2025年6月22日にサンプルファイルを更新しましたので、それ以降にダウンロードした方でしたら問題なく動作します。
詳細は 8 章の注釈をご覧ください。
10章
p.209, 機体B用のABS樹脂板の購入について
p.209の表10-2、およびp.214において、機体Bの作成のために「スタジオミュウ タッピングプレート」も「TAMIYAユニバーサルプレート」も入手できない場合、「はざいや」で「ABS樹脂板」を購入して加工するのがよい、と述べました。
しかし、2025年9月に確認したところ、大きなサイズからの切り出しでしか購入できなくなっておりました(1000×2000で4000円程度)そのため、現在はこの代替案はお勧めしません。
ただし、2025年9月の時点では「TAMIYAユニバーサルプレート」の在庫が復活しておりますので工作は問題なくできると思います。
ここからは、穴の開いていないABS樹脂板を入手できた場合の加工方法を記します。
入手したABS樹脂板に対し、下記の図の位置にピンバイスで3.2mmの穴をあけます。
上図の通りに穴をあけた様子が下図になります。
そして、これらを用い、アームクローラー工作セット(2chリモコンタイプ)で機体Bを組み立てた様子が下図になります。
p.210, 図10-1の高解像度画像
p.210にある図10-1の高解像度画像は以下となります。クリックすると拡大されます。
p.213, 図10-3の高解像度画像
p.213にある図10-3の高解像度画像は以下となります。クリックすると拡大されます。
p.217, FastAPI用に書かれたプログラムを実行するためのコマンド
p.217に記した、FastAPI用に書かれたプログラムを実行するためのコマンドは以下の通りです。
新規に開いたターミナルで、下記のコマンドを一つずつ順に実行するのでした。
cd gihyo/10-01-tank
python3 app.py
p.219, webtankサービス用の設定ファイルを編集するためのコマンド
p.219に記した、webtankサービス用の設定ファイルを編集するためのコマンドは以下の通りです。
新規に開いたターミナルで、下記のコマンドを一つずつ順に実行するのでした。
cd gihyo/10-01-tank
mousepad webtank.service
p.220, webtankサービス用の設定ファイルをシステム領域に移動するためのコマンド
p.219に記した、webtankサービス用の設定ファイルを編集するためのコマンドは以下の通りです。
mousepad を起動したフォルダ(すなわち、gihyo/10-01-tankフォルダ)で以下のコマンドを実行します。
sudo mv webtank.service /etc/systemd/system/
p.220, webtankサービスの自動実行を有効にするコマンド
p.219に記した、webtankサービス用の設定ファイルを編集するためのコマンドは以下の通りです。
mousepad を起動したフォルダ(すなわち、gihyo/10-01-tankフォルダ)で以下のコマンドを実行します。
sudo systemctl enable webtank
p.221, LCDへのIPアドレスの表示に関わるコマンド
p.221に記した、自動実行したいプログラムを記述するためのファイル /etc/rc.local を管理者権限で開くためのコマンドは以下の通りです。
sudo mousepad /etc/rc.local
さて、このコマンドを実行したとき、既存ファイルである /etc/rc.local がテキストエディタ mousepad で開かれます。そうなった方は先に進んで構いません。
しかし、2024年11月以降の OS では、ファイル /etc/rc.local が削除され存在しないため、mousepad は空白の状態で開きます。そうなった場合、一旦 mousepad を閉じ、以下の3コマンドを順に実行することにより、新たにファイル /etc/rc.local を作成しましょう。
wget https://raw.githubusercontent.com/neuralassembly/raspi/refs/heads/master/rc.local
chmod a+x rc.local
sudo mv rc.local /etc
この3コマンドを実行してファイル /etc/rc.local を作成したら、上記の mousepad で /etc/rc.local を開くコマンドを実行し、以下に進みましょう。
p.222, IPアドレスをLCDに表示するために /etc/rc.local に記入するコマンド
p.222に記した、IPアドレスをLCDに表示するために /etc/rc.local の「exit 0」の行の上に記入するコマンドは下記の通りです。
python3 /home/kanamaru/gihyo/07-02-LCD.py $_IP
なお、上のコマンドの「kanamaru」の部分はみなさんのユーザー名に変更する必要があります。
p.223, シャットダウンプログラムの自動実行のために /etc/rc.local に記入するコマンド
p.223に記した、シャットダウンプログラムの自動実行のために /etc/rc.local の「exit 0」の行の上に記入するコマンドは下記の通りです。「&」も忘れずに記述しましょう。
python3 /home/kanamaru/gihyo/10-04-sw-poweroff.py &
なお、上のコマンドの「kanamaru」の部分はみなさんのユーザー名に変更する必要があります。
p.224, mjpg-streamer のインストールコマンド
p.224に記した、mjpg-streamerのインストールコマンドは下記の通りです
(1) sudo apt update
(2) sudo apt -y install libjpeg-dev cmake libcamera-dev
(3) git clone https://github.com/neuralpi/mjpg-streamer
(4) cd mjpg-streamer/mjpg-streamer-experimental
(5) make
(6) cd
(7) sudo mv mjpg-streamer/mjpg-streamer-experimental /opt/mjpg-streamer
なお、OS として Bullseye やリリース直後の Bookworm をお使いの方は、上記の (5) で LibCamera.cpp のビルド中にエラーが起こると思います。その場合、エラーが出た状態から以下の 8 コマンドを一つずつ順に実行してください。この 8 コマンドが上記 (5)~(7) の代替、というイメージです。
rm -rf _build
mkdir _build
cd _build
cmake -DLIBCAMERA_USES_TRANSFORM=ON ..
cd ..
make
cd
sudo mv mjpg-streamer/mjpg-streamer-experimental /opt/mjpg-streamer
p.225:mjpg-streamerの実行用コマンド
p.225に記した、mjpg-streamerを実行するために /etc/rc.local の「exit 0」の行の上に記入するコマンドは下記の通りです。
python3 /home/kanamaru/gihyo/10-05-stream.py &
なお、上のコマンドの「kanamaru」の部分はみなさんのユーザー名に変更する必要があります。
p.226:webtank.serviceを編集するためのコマンド
p.226に記した、webtank.serviceを編集するためのコマンドは下記の通りです。
sudo mousepad /etc/systemd/system/webtank.service
p.228, 図10-10の高解像度画像
p.228にある図10-10の高解像度画像は以下となります。クリックすると拡大されます。
p.229:webtankサービスの自動実行を停止するコマンド
p.229に記した、webtankサービスの自動起動を停止するためのコマンドは下記の通りです
sudo systemctl disable webtank
p.230, 図10-11の高解像度画像
p.230にある図10-11の高解像度画像は以下となります。クリックすると拡大されます。
p.231, 図10-12の高解像度画像
p.231にある図10-12の高解像度画像は以下となります。クリックすると拡大されます。
10章全般:キャタピラ式模型のメンテナンス
キャタピラ式模型を長く使っていると、だんだん動作が安定しなくなってくることがあります。例えば「右のキャタピラは正常動作するが、左はなかなか動かない」などです。
もちろん、「ジャンパーワイヤーが抜けていないか」など、回路の配線をまずはチェックすべきです。
しかし回路の配線に問題がなかった場合、どこに注意してメンテナンスすべきかを以下に記します。上から順にチェックしていきましょう。
- 電池の残量不足ではないかチェック:基本ではありますが、まずはここからチェックしましょう。
- モーターの軸が空回りしていないかチェック:モーターの軸にはピニオンギアが取り付けられています。ピニオンギアが劣化してゆるくなり、モーターの軸が空回りすることがしばしば起こります。これはモーターをギアボックスから取り外してみないとわかりません。ピニオンギアがゆるくなっていた場合、「AO-7005 8Tピニオンセット白(10個)」や「AO-1014 8Tピニオン(紫)」などを購入して交換しましょう。ギア部で異音がする場合は大体このケースが当てはまります。個人的に、この問題には何度も遭遇しています。
- ジャンパワイヤのチェック:ジャンパワイヤの抜き差しをする際、持ち手ではなくケーブルを引っ張ることを繰り返すと中で断線することがあります。断線したかどうかは外から見ただけではわかりません。断線が疑われるジャンパワイヤは捨ててしまった方がよいでしょう。これも回路のパーツを長く使っていると遭遇することの多い問題ですね。
- ブレッドボードのチェック:ブレッドボードを長くつかっていると、なんらかの理由でブレッドボード内部の抵抗が大きくなりモーターがあまり回転しなくなることがあります。頻繁に起こることではないと思いますが、筆者は何度かそのような経験をしています。安価なもので良いのでテスターを購入すると内部の抵抗の大きさをチェックできます。内部の抵抗が大きく計測されたブレッドボードは消耗品と考えて捨ててしまった方がよいでしょう。
- ギアボックスで空回りしているシャフトがないかチェック:ギアボックスの作成の際、イモネジを六角レンチで締めてシャフトを固定している部分があります。そこが緩んで空回りしていないかチェックしましょう。
- モーターのチェック:上のどの問題にも該当しなかった場合、モーターに問題がある可能性があります。新品の「AO-1001 FA-130タイプノーマルモーター」を購入して交換してみるのも手です。
- モータードライバーのチェック:上のどの問題にも該当しなかった場合、モータードライバに問題がある可能性があります。新品のモータードライバーを購入して交換してみるのも手です。
付録
p.238, サンプルファイルのダウンロードコマンド
p.238に記した、本書のサンプルファイルのダウンロードコマンドは以下の通りです。Raspberry Piがネットワークに接続されている必要があります。
git clone https://github.com/neuralpi/gihyo
p.238, git コマンドのインストールコマンド
執筆時の Raspberry Pi OS では実行不要ですが、git のインストールのコマンドを念のために記すと以下のようになります。
sudo apt update
sudo apt -y install git
p.240, zip 圧縮されたサンプルファイルgihyo-master.zipを展開するコマンド
p.240に記した、 zip 圧縮されたサンプルファイルgihyo-master.zipを展開するコマンドは以下の通りです。二つのコマンドを一つずつ順に実行してください。
unzip gihyo-master.zip
mv gihyo-master gihyo
p.241, nano の設定ファイル .nanorc に記す内容
p.241に記した、nano の設定ファイル .nanorc に記す内容は以下の通りです。
set tabsize "4"
set tabstospaces
p.241, vi の設定ファイル .vimrc に記す内容
p.241に記した、vim の設定ファイル .vimrc に記す内容は以下の通りです。
set expandtab
set tabstop=4
set softtabstop=4
set shiftwidth=4
p.242, IPアドレスの代わりに利用可能なアドレス
p.241に記した、IPアドレスの代わりに利用可能なアドレスは以下の通りです。
raspberrypi.local
9章の演習で用いるアドレスの形式で書くと、例えば以下のようになるでしょう。
http://raspberrypi.local:8000/9-1
p.242, Windows 用 iTunes をダウンロードするためのリンク
p.242 で紹介した、 Windows 用 iTunes をダウンロードするためのリンクは以下です。
このリンク先のページを少しスクロールしたところにある
「ほかのバージョンをお探しですか? macOS> Windows> 」の「Windows>」をクリックすることで、iTunes64Setup.exe をダウンロードできるのでした。
p.243, Raspberry Pi の IP アドレスを検索するための Android アプリへのリンク
p.243で紹介した、Raspberry Pi の IP アドレスを検索するための Android アプリへのリンクは以下です。
このアプリで raspberrypi という名称を検索すると、IP アドレスを知ることができます。
p.243, 日本語入力ソフトウェアのインストールの準備
p.243に記した、raspi-configの実行コマンドは以下の通りです。
sudo raspi-config
p.244, 日本語入力ソフトウェアのインストールコマンド
p.244に記した、日本語入力ソフトウェアのインストールコマンドは以下の通りです。
sudo apt update
sudo apt -y install fcitx-mozc
なお、画面描画の仕組みを Wayland から X11 に変更し、fcitx-mozc を正常に使えるようにするには、下記の手順に従います。
- ターミナルで「 sudo raspi-config 」コマンドを実行し、設定画面を開く
- キーボードの「↓」キーを五回押し、「6 Advanced Options」にフォーカスを合わせる
- キーボードの「Enter」キーを押し、「6 Advanced Options」に入る
- キーボードの「↓」キーを六回押し、「A7 Wayland」にフォーカスを合わせる
- キーボードの「Enter」キーを押し、「A7 Wayland」に入る
- 「w1 X11」にフォーカスが合っていることを確認する。合っていなければ「↑」キーで合わせる
- キーボードの「Enter」キーを押し、「w1 X11」を選択する
- キーボードの「Enter」キーを押し、「了解」を選択する
- キーボードの「TAB」キー二回を押し、「Finish」にフォーカスを合わせる
- キーボードの「Enter」キーを押すと、再起動され設定が有効になる
なお、fcitx-mozc を使っていると、キーボードの設定が英語キーボードになってしまうことがあるように思います。その解決方法を記します。
まず、右上のキーボードアイコン(または「あ」アイコン)を右クリックし、下図のように「入力メソッド」の項目を確認します。図のように「キーボード - 日本語」、「Mozc」の二つの項目がこの順番で並んでいれば、問題は解決します。この状態を目指します。
そのためには、右上のキーボードアイコン(または「あ」アイコン)を右クリックし、「設定」を選択します。「入力メソッド」のタブで、項目が「キーボード - 日本語」、「Mozc」の二つになるように調整します。
図に記されているように、「+」ボタンで「キーボード - 日本語」の追加、「-」ボタンで「キーボード - 英語 (US)」の削除、「↑」「↓」ボタンで「キーボード - 日本語」を一番上に移動、などをする必要がある場合があります。
そして、上図に見えている「再起動」の項目を選択して fcitx-mozc を再起動することで設定が完了します。
以上です。
p.244, 日本語フォントのインストールコマンド
p.244に記した、日本語フォントのインストールコマンドは以下の通りです。
sudo apt -y install fonts-vlgothic
p.250, 参考文献のリンク
p.250の参考文献で記したリンクは以下の通りです。